
基于5G的智能化工(gōng)作面 系統由地面集控制中(zhōng)心、順槽控制中(zhōng)心和工(gōng)作面綜采設備構成。
地面集控中(zhōng)心主要由采煤機設備控制台、控制計算機、服務器、交換機、5G核心網和5G BBU等組成。系統可以實時監控工(gōng)作面生(shēng)産畫面,以及生(shēng)産實時監控數據和曆史統計數據;也可以接管順槽控制中(zhōng)心的控制功能,在地面控制中(zhōng)心實現對綜采面采煤機、液壓支架等設備的遠程操控。
順槽控制中(zhōng)心主要由控制計算機、顯示器、交換機、設備操作控制台等組成,将工(gōng)人的工(gōng)作場所從工(gōng)作面解放(fàng)到順槽,實現在順槽監控中(zhōng)心對設備的遠程操控。
工(gōng)作面設備主要包括液壓支架、采煤機、刮闆輸送機、膠帶輸送機、供液系統等。這些設備根據接口配置相應的綜合接入器(内置5G傳輸模塊),通過井下(xià)5G基站實現視頻(pín)和監控及控制信号無線傳輸,從而實現遠程控制功能。

實現少人甚至無人化采煤,大(dà)幅提高生(shēng)産效率,有效提升安全生(shēng)産水平。
智能掘錨系統 設備 主要部署在掘錨一(yī)體(tǐ)機和錨杆台車(chē)上,系統包含慣性導航系統、3D掃描成像系統、定位智能截割系統、安全防護系統、電(diàn)氣控制系統、視頻(pín)監控系統、5G無線通信系統、光纖傳輸環網、井下(xià)控制系統和地面控制中(zhōng)心等幾部分(fēn)。
系統在井下(xià)順槽部署5G核心網、5G基站控制器,在掘錨一(yī)體(tǐ)機和錨杆台車(chē)上部署5G基站和 CPE,礦用高清攝像機、3D掃描成像數據、傳感器以及電(diàn)氣控制系統通過5G CPE接入5G網絡,經由5G核心網與井下(xià)控制中(zhōng)心和地面控制中(zhōng)心監控系統對接,實現設備掘錨設備實時工(gōng)況數據、3D成像數據、高清視頻(pín)和遠程控制指令等的傳輸。全方位展現掘進工(gōng)作面場景;控制系統數據通過與設備的控制器實時通訊,可對設備進行遠程遙控操作,并對截割軌迹實時監測。


智能化掘錨系統集快速掘進、掘錨同步、智能導向、智能檢測等功能于一(yī)體(tǐ),具有“高效、環保、安全、可靠”的特點,爲煤礦掘進設備智能化演進打下(xià)了堅實基礎,有力支撐煤礦智能化建設掘進系統建設。
礦用機器人巡檢系統主要由巡檢機器人、移動巡檢平台、無線通訊系統、各種信号采集設備和軌道系統組成,适用于綜合管廊、電(diàn)纜管廊、礦山水泵房、變電(diàn)所、大(dà)型輸送帶巷道移動巡檢。
礦用軌道巡檢機器人采用先進無線數傳等技術,實現機器人在軌道自動或手動控制運行,對整個軌迹内的聲音、圖像、氣體(tǐ)等參數的實時采集、回傳、存儲及分(fēn)析。
礦用巡檢機器人搭載熱成像視頻(pín)監控模塊、多參數傳感器及語音識别系統,實時采集、存儲、傳輸現場的圖像、聲音、溫度、煙霧、甲烷等數據,通過對數據的分(fēn)析,判斷是否存在設備故障并進行故障定位。
礦用巡檢機器人能夠替代礦山巡檢人員(yuán)進行可靠巡檢,減輕工(gōng)作人員(yuán)的勞動強度、降低勞動風險,及時發現問題,避免事故擴大(dà)化,降低生(shēng)産過程中(zhōng)的非正常停機時間。
借助5G大(dà)帶寬、低時延的特性,爲煤礦提供全環節的高清視頻(pín)監控服務。采集井下(xià)高清視頻(pín)數據,利用5G和工(gōng)業環網組成的高速網絡,實時傳輸高清視頻(pín)到後台應用,實現對皮帶運輸、探放(fàng)水、工(gōng)作人員(yuán)活動行爲等重點信息的自動識别;通過分(fēn)析視頻(pín)圖像,及時發現現場災害(透水、火(huǒ)光、濃煙霧、大(dà)粉塵、冒頂等)、人員(yuán)違規、人員(yuán)狀态異常等情況,通過邊緣計算服務器的視頻(pín)分(fēn)析,實時輸出分(fēn)析結果,爲煤礦安全生(shēng)産提供智能安全預警,保護煤礦人員(yuán)及财産安全。

借助5G大(dà)帶寬、低時延的特性,爲礦山提供全環節的高清視頻(pín)監控服務。通過視頻(pín)影像分(fēn)析實時給出圖像分(fēn)析結果,爲礦山提供智能安全預警,保護礦山人員(yuán)及财産安全。
礦用機器人巡檢系統主要由巡檢機器人、移動巡檢平台、無線通訊系統、各種信号采集設備和軌道系統組成,适用于綜合管廊、電(diàn)纜管廊、礦山水泵房、變電(diàn)所、大(dà)型輸送帶巷道移動巡檢。
礦用軌道巡檢機器人采用先進無線數傳等技術,實現機器人在軌道自動或手動控制運行,對整個軌迹内的聲音、圖像、氣體(tǐ)等參數的實時采集、回傳、存儲及分(fēn)析。
礦用巡檢機器人搭載熱成像視頻(pín)監控模塊、多參數傳感器及語音識别系統,實時采集、存儲、傳輸現場的圖像、聲音、溫度、煙霧、甲烷等數據,通過對數據的分(fēn)析,判斷是否存在設備故障并進行故障定位。
礦用巡檢機器人能夠替代礦山巡檢人員(yuán)進行可靠巡檢,減輕工(gōng)作人員(yuán)的勞動強度、降低勞動風險,及時發現問題,避免事故擴大(dà)化,降低生(shēng)産過程中(zhōng)的非正常停機時間。
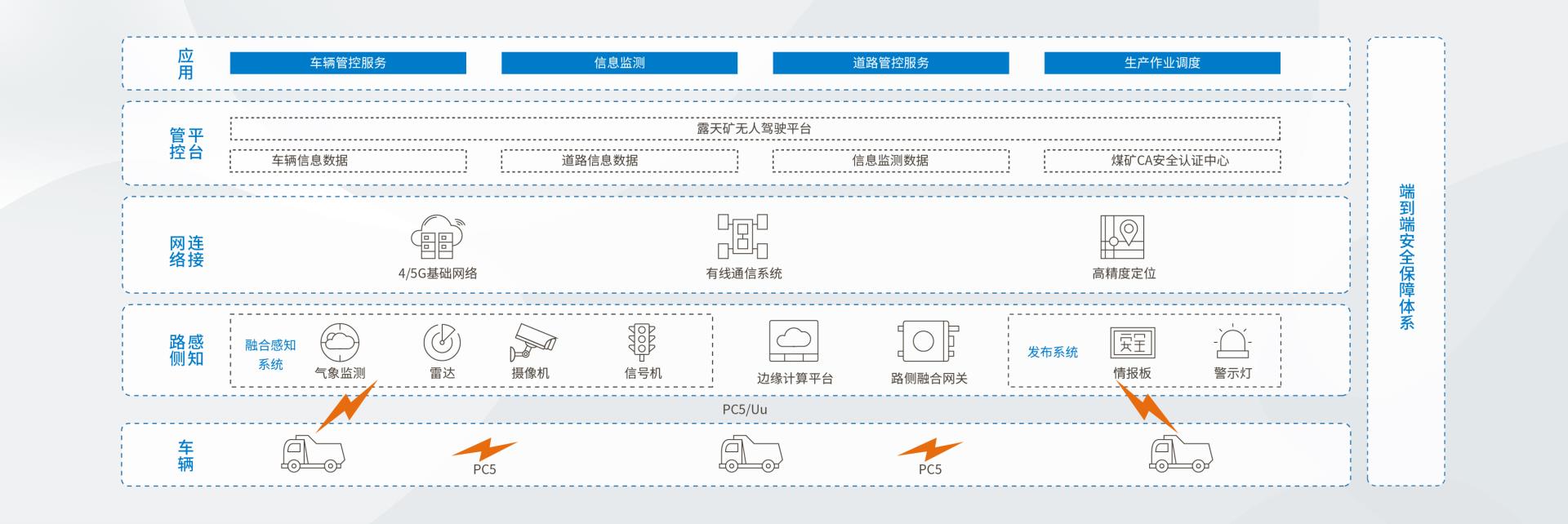
基于5G的露天礦車(chē)無人駕駛系統總體(tǐ)技術架構包括:車(chē)輛(礦卡)、路側感知(zhī)設備、網絡連接、管控平台和應用平台四個層面,以及端到端的安全保障體(tǐ)系。
智慧礦山無人駕駛系統遵循“鑽、爆、采、運、排”的基本生(shēng)産作業流程,依據“采、運、排”作業流程,可以将無人駕駛作業場景劃分(fēn)爲裝載、運輸和卸載三個作業場景。此外(wài),還存在作業保障(加油補水、維修保養等)場景。爲實現上述作業流程,提高無人駕駛的效率和安全性,需要礦卡遠程遙控駕駛、礦卡與其他工(gōng)程機械之間作業協同、礦卡行駛路徑規劃等應用的支撐。
露天礦車(chē)無人駕駛系統典型應用包括:遠程遙控駕駛、作業協同、路徑規劃、車(chē)與車(chē)碰撞預警、道路狀況提醒等。


通過露天礦車(chē)無人駕駛系統替代駕駛員(yuán),可實現整個露天礦區生(shēng)産運輸作業的無人化,從根本上杜絕生(shēng)産過程中(zhōng)人員(yuán)安全事故的發生(shēng),提高生(shēng)産安全性,同時有效降低生(shēng)産成本,提高生(shēng)産效率。
9、支持通過IMS接口與運營商(shāng)網絡進行對接,實現與運營商(shāng)網絡互聯互通。
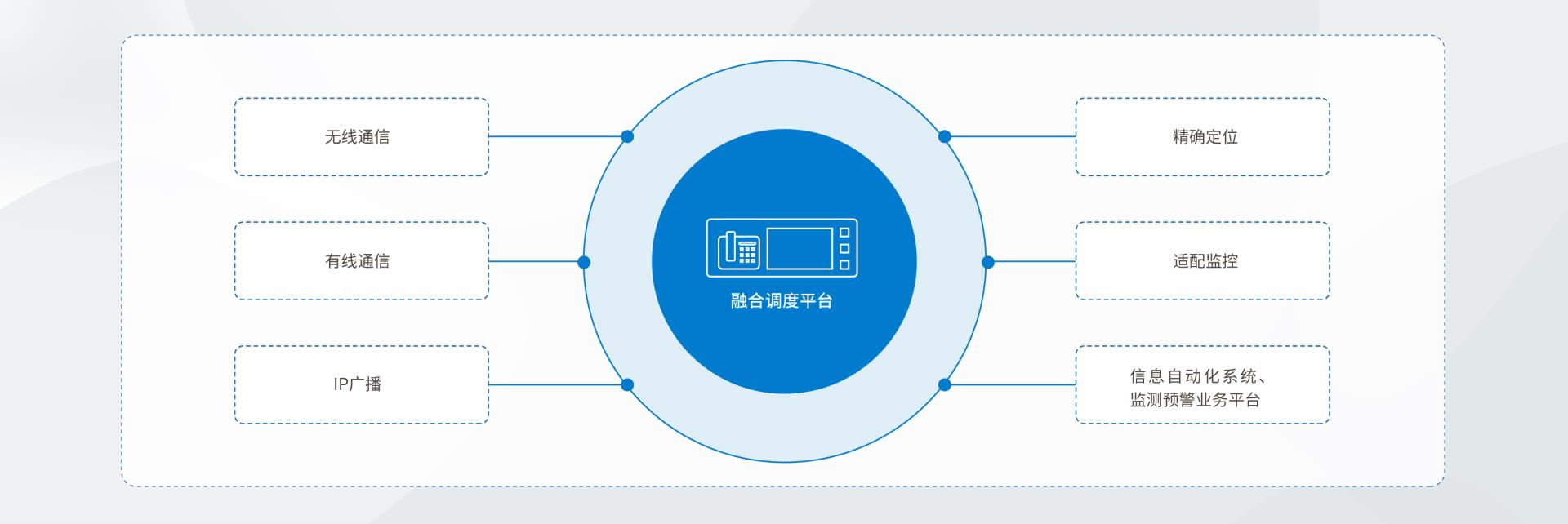

有線、無線、廣播等不同通信手段之間無縫融合,有線、無線一(yī)個調度界面統一(yī)調度,實現對各種通信系統語音、視頻(pín)、數據業務的交互融合和綜合調用。